ARLISSって何?
2023年9月10日から15日にアメリカのネバダ州ブラックロック砂漠で行われた超小型人工衛星CanSatの打ち上げ実証実験であるARLISSに参加してきました.ARLISSではアマチュアロケット団体AeroPACの方に協力してもらい,制作したCanSatをロケットに載せて打ち上げ,ロケットから放出されたCanSatが砂漠中の目的地に自律的に降りたり,走ったりするコンペティションです.自分たちでミッション (目標)を設定して,それの達成を目指します.
ARLISSという名前を初めて聞いた方が多いかもしれませんが,実はマンガ「宇宙兄弟」でARLISSのシーンがありました.公式サイトでも紹介されています.実は宇宙兄弟に出てくるスポンジタイヤのローバは私の研究室のローバがもとになっているそうです(今でもスポンジタイヤを使ってます).

ARLISSはUNISECという宇宙工学の分野で学生を支援をするNPOによって運営されています.運営の主要メンバーも学生です(お疲れ様です...).
そんなARLISSですが,誰でもアメリカで打ち上げられるわけではなく,審査に通った機体だけ打ち上げられます.
審査は主に下記があります.
- (ミッションレビュー)
- 1次審査(今後の試験計画や試験方法の妥当性をチェック)
- 2次審査(各種実験結果,安全に関する最終審査)
ミッションレビューは審査とは関係ないですが,設定したミッション(目的)をもっと面白くするには,実現性を高めるにはという面でアドバイスがもらえます.1次審査では,そのCanSatをつくる背景,ミッションの段階的目的,その評価方法,開発機体の詳細,安全やミッションを達成できる機体かの試験計画について確認されます.2次審査では1次審査で足りなかった部分や実際に行った試験結果等を審査員が見て,問題がないことがわかってから初めて打ち上げられます,
試験内容は多岐に渡ります.着地衝撃試験,開傘衝撃試験,振動試験,分離衝撃試験,準静的荷重試験,収納放出試験,パラシュート投下試験,長距離通信試験,質量試験,走破能力試験,GPS誘導試験,End-to-end試験,制御レポート作成試験等の多くの実験を得て審査されます.
これらの実験はJAXA等で実際にされている試験です(というか審査書のフォーマットがJAXAを参考にしています).
ARLISSで何をしてきたのか
私たちのチームPrTでは,ワイヤレス給電可能なローバーと給電基地を開発し,ARLISSの場で実験してきました.近年,月にある縦穴(溶岩チューブ)が,人間の月での新しい住居や貴重な鉱物資源があるとして注目されています.しかし,従来の宇宙探査ローバは動力を太陽光で賄う太陽光発電がメインでしたが,光が入らない縦穴では充電できません.そこで,洞窟の外に動力源を持つ給電基地を縦穴内に設置し,ローバは縦穴内を探索しながら必用に応じて給電するという方法を提案しました.
私たちは電磁誘導を用いたワイヤレス給電が可能なローバを開発しましたが,大きな問題がありました.それは電磁誘導方式の給電はコイル同士の位置ずれに非情に弱いことです.そのためローバが給電基地に精密に誘導できる仕組みを考える必要がありました.例えばルンバでは赤外線を用いて,これを行いますが宇宙環境の赤外線は地球環境に比べて強く赤外線は信頼できるものではありません(地球でも太陽下ではまともに使用できない).そこで,私たちはGPS誘導,ARマーカー誘導,リニアアクチュエータと磁石の誘導の3つの誘導により精密誘導を実現しました.
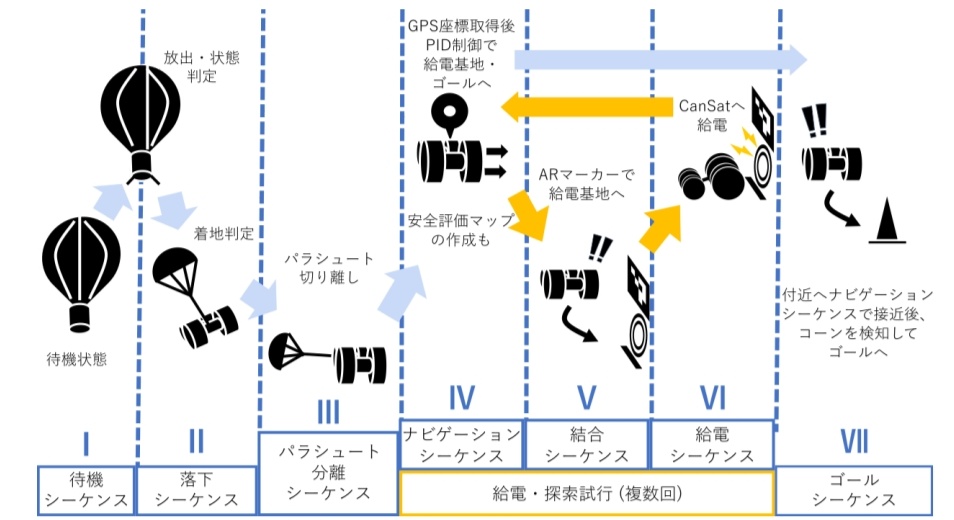
ARLISSでの具体的なミッションは以下の通りです.
- 着地したら給電基地にGO
- 精密誘導手法により給電基地で15分充電
- 充電後周りを10分探索
- 2. 3をあと2回繰り返す
- ゴール(コーンがある移動目的地点)を目指す
- ゴールに0mで到着する
さて,上のフローを見ただけで最高に狂ったミッションになっていることがわかると思います(笑).本番当日までみんなで割と後悔してました.
結果ですが,なんとすべての目標を達成しました(8888).ARLISS2023で総合優勝(Overall winner)と目標地点への誘導精度を競うAccuracy Awardで 1stをもらいました!!!


ちなみに自分は,主にミッションの企画・設計や回路や給電部分の部品選定,回路設計,開発を担当してました.
ARLISS中の生活
折角なのでCanSatの話だけでなく,ARLISS中の生活についても話したいと思います.ブラックロック砂漠はネバダ州にある乾燥地帯です.毎年バーニングマンという祭が開催されていることで有名です.リノという町の空港に降りて,リノ(Reno)からファンリー(Fernley)を経由して砂漠の近くの町ガーラック(Gerlach)に車で向かいます.このGerlachで一週間ほど生活をしますが,スーパー等は一切ないため私たちの団体はFernleyで1週間分の食料と水を買い込んで生活しています(一応Empireという町に小さいコンビニみたい店があります),ちなみにスケールがバグりますが,FernleyとGerlach間は片道2, 3時間かかります.Gerlachは砂漠前の町でARLISSは特にバーニングマン直後にあり,怖い人たちがいますので注意で必用です.Gerlachでキッチン付きの部屋を借りて,砂漠と宿を言ったり来たりしながらARLISSに参加します.今年はチームに関係なく来てくれた人がいたおかげで餓死せずにすみました(感謝).

日本にいるとここまで広大な砂漠に出会うことはないので,かなりワクワクします.が.同時に超絶広大なので迷子もしくは水がなくなるとマジで死にます(ちなみにロケットやCanSatも打ち上げっているのでそれに当たっても重症もしくは死にます).写真だと山がちょっと遠くにあるように見えますが,実際はめちゃくちゃ離れているので絶対に歩いては行けない距離です.正直,こことアメリカの治安悪いところを経験すると日本で何もビビることがなくなりました...
ARLISS期間中は割と過酷な日々を送ってましたね.まず昼を過ぎると風が強くなる傾向にあるため朝の打ち上げを狙います.なので,朝5時とか6時にはもう準備や機体整備を終えて,砂漠で最後のEnd-to-end試験を行って完璧な仕上がりになってから,打ち上げ前の最終チェックを行い,打ち上げという流れになります.なので朝から準備をしていても打ち上げは昼ぐらいになります.もし今日は打ち上げできる状況では無さそうだったら,ひたすら砂漠で実験と調整をします.夜になったら宿に戻って,また機体の調整と整備をするというループを繰り返していました.正直ARLISS期間中は打ち上げが終わるまでほとんど寝てないです.
あとはロケットに詰め込んで打ち上げもらい,無事成功することを祈ります.

話は変わりますが,AeroPACの方が夜に花火のような感じで光るロケットを打ち上げるイベントをやっており結構きれいなのでおすすめです.夜の砂漠は星を遮るものが何もないので,めちゃくちゃ綺麗に星が見えます.

アメリカ観光
ARLISSに行った後,日本に戻るまでの2, 3日アメリカ観光をしました.今年はシアトルに行きました.海が近くて綺麗なところでした!!!
パイクプレイス・マーケットはスタバックス1号店や食べ物屋,市場等があります.クラムチャウダーとかが有名です.


航空博物館にも行きました.大量の実物飛行機が並んでいて,中にも入れるすごいところでした.


チフーリ・ガーデン・アンド・ガラスというガラスアートの展示を見に行きました,ガラスがめちゃくちゃ綺麗で個人的おすすめスポットです.